연구소소개
KIST, 소셜로봇의 새로운 패러다임을 제시하다
- 등록일 : 23-01-20
- 지능로봇연구단 곽소나 선임연구원
- 조회수 : 11612
- KIST 콜래봇(CollaBot), ICSR 2022 하드웨어, 디자인, 인터페이스 부문 최고상 수상
- 상황맥락을 파악해 복합 서비스를 제공하는 로보틱 도서관 시스템
한국과학기술연구원(KIST, 원장 윤석진)은 곽소나 박사 연구팀이 2022년 12월 13일부터 16일까지 이탈리아 피렌체 상공회의소에서 개최된 국제 소셜로봇 학술대회 (International Conference on Social Robotics 2022, 이하 ICSR 2022)의 일환으로 개최된 로봇디자인 대회에 콜래봇(CollaBot)을 출품해 유니버시티 칼리지 런던 (University College London)의 버블 월드(Bubble Worlds)와 최종 경합 끝에, <하드웨어, 디자인, 인터페이스> 부문 최고상의 영예를 안았다고 밝혔다.
기존 소셜로봇 관련 연구는 휴머노이드 로봇을 기반으로 한 연구가 주를 이루었다. 다시 말해 휴머노이드 로봇이 상황을 파악하고, 다양한 도구를 사용해 상황에 적합한 복합 서비스를 제공하는 것을 목표로 했다. 그런데, 인간을 닮은 휴머노이드 로봇은 소비자가 인간 또는 그 이상의 능력을 기대하게 했지만, 실제 기능은 그에 미치지 못해 시장진입에 어려움을 겪고 있었다. 또한 로보틱 제품은 하나의 기능에 특화되어 개발될 수밖에 없으므로 소비자의 상황맥락에 맞는 다양한 복합 서비스를 제공하는데 있어서는 분명한 한계를 갖고 있었다.
KIST 곽소나 박사 연구팀은 이와 같은 한계를 극복하기 위한 방안으로 다수의 로보틱 제품이 인식한 정보를 통합하여 상황 맥락을 파악하고 인식한 상황에 적합한 서비스를 제공하는 로보틱 도서관 시스템 콜래봇(CollaBot)을 개발했다. 책장, 책상, 의자, 조명 등으로 구성된 이 시스템은 다수의 로보틱 제품 간 협업을 기반으로 한 인간-로봇 상호작용을 제공한다.
세부적인 시스템 환경은 다음과 같다. 사용자의 휴대폰, 출입문, 로보틱 책장, 로보틱 의자가 서로 연결되어 휴대폰으로 검색하면 해당 도서가 위치한 책장이 돌출된다. 의자는 책장의 높이에 따라 사다리의 역할을 하기도 하고, 이동해야 하는 책이 많을 경우 카트의 역할을 하기도 한다. 다시 말해 각각의 구성요소가 가 본연의 기능뿐 아니라 상황 맥락에 따라 기능을 변환하여 사용자 맞춤형 서비스를 지원하게 되는 것이다.
콜래봇의 상호작용을 디자인한 KIST 강다현 박사는 “본 연구에서 제안하는 다수의 로보틱 제품 간 협업을 기반으로 한 로보틱 시스템은 기존 사물인터넷(Internet of Things)에 로봇 기술을 적용해 물리적 서비스까지 제공할 수 있게 되어 다양한 경로를 통한 상황 맥락 인식 및 서비스가 가능한 로봇 사물인터넷(Internet of Robotic Things) 기반 초연결 사회를 구현할 수 있을 것이다. 우리의 일상생활에 실질적인 도움을 주는 서비스 제공하는 이러한 시스템은 이제까지 와는 다른 개념의 새로운 로봇 시장을 개척할 수 있을 것으로 기대한다.”라고 밝혔다.
올해로 13회째를 맞은 ICSR의 로봇 디자인 대회는 대표적인 소셜로봇인, 소피아(Sophia), 나오(Nao), 페퍼(Pepper)의 개발에 참여하였던 아밋 쿠머 팬디(Amit Kumar Pandey)가 심사위원장을 맡고 있다.
본 연구는 KIST 주요사업과 KIST 기술융합지원센터 기술지원 프로그램으로 수행되었다.
* (작품명) CollaBot: Collaborative Human-Robot Interaction Design for Robotic Library
- (제1저자) 한국과학기술연구원 강다현 포닥
- (공동저자) 김민희 학생, 최주한 학생, 이원일 학생
- (교신저자) 한국과학기술연구원 곽소나 선임연구원

그림 1. 로보틱 서재, 콜래봇
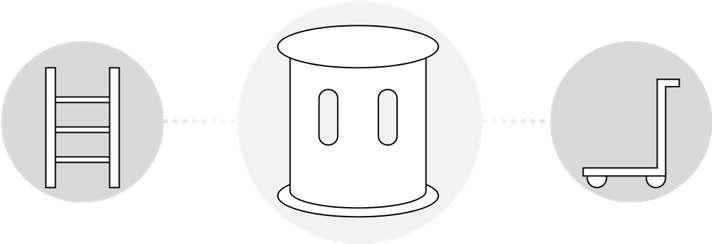
그림 2. 상황 맥락에 따라 기능을 변형하는 의자

그림 3. 로보틱 도서관 시연 사례 - 사용자 키 정보를 기반으로 한 서비스 사례

그림 4. 로보틱 도서관 시연 사례 - 책의 개수를 기반으로 한 서비스 사례