Artificial Intelligence and Robotics Institute
-
3
KIST's 'Moonwalk', a robot that makes climbing Bukhansan Mountain easier
- Elderly man wears robot to climb Bukhansan Mountain in wearable robotics challenge - Wearable robots are leaving the hospital and entering our lives. As people age, they gradually lose muscle strength in their arms and legs, making it difficult for them to participate in leisure activities such as hiking and traveling, and they often need to rely on assistive devices such as canes and wheelchairs for mobility. However, these assistive devices do not improve muscle strength, so wearable robots that can compensate for the lack of muscle strength with the help of robots are attracting attention as an innovative technology to improve the health and quality of life of the elderly. Dr. Lee Jongwon of the Intelligent Robotics Research Center at the Korea Institute of Science and Technology(KIST) has developed a wearable robot, MOONWALK-Omni, which means 'to actively support leg strength in any direction(omnidirection) to help walk like walking on the moon', has announced that a senior citizen wearing it successfully completed a wearable robot challenge to climb to the top of Mount Yeongbong (604 meters above sea level) in Korea. The challenge raised the possibility of commercializing wearable robots in outdoor complex environments by successfully climbing with the help of the robot's muscle strength without changing batteries or intervention from developers. Various types of wearable robots have been developed in the past, but due to their heavy weight and large volume, they have been limited to the rehabilitation process of patients in hospitals with simple indoor environments. However, MOONWALK-Omni is an ultra-lightweight wearable strength-assistance robot that predicts the user's movements and supports insufficient leg strength to help the elderly rehabilitate and assist with daily activities. The 2-kilogram device can be easily donned by an older adult in less than 10 seconds without assistance, and its four ultra-lightweight, high-powered actuators on either side of the pelvis help balance the user while walking and boost the wearer's leg strength by up to 30 percent to increase propulsion. The robot's artificial intelligence (AI) analyzes the wearer's gait in real time and provides safe and effective muscle support in a variety of walking environments, including gentle slopes, rough rocky paths, steep wooden stairs, and uneven stone steps. Through the Bukhansan Mountain Wearable Robot Challenge, the research team succeeded in verifying the performance and reliability of muscle support using wearable robots in everyday environments that are more complex than hospitals. An elderly participant in the challenge said, "I thought I would have to give up mountain climbing, which I have enjoyed since I was young, but I feel 10 to 20 years younger after climbing the mountain comfortably with the wearable robot," and shared his impressions of climbing the mountain with the wearable robot. Dr. Lee Jong-won of KIST said, "Through this challenge, we have obtained experimental data that shows that safe and effective strength support is possible in a variety of walking environments." "Through the convergence of ultra-lightweight, high-power wearable robot drive technology and personalized artificial intelligence strength support technology, it is expected to be widely used in the fields of daily assistance, rehabilitation, and exercise for the elderly who lack muscle strength due to aging." As a follow-up to MOONWALK-Omni, the research team is developing MOONWALK-Support, which not only strengthens leg muscles but also supports the complex joints of the lower extremities such as hip and knee. In addition, the team has achieved achievements in various fields by transferring core technologies and components such as motors, reducers, and computing circuits for wearable robots to company in Korea. [Figure 1] (Bukhansan Challenge)An elderly man walks up a complex stone staircase environment while wearing a robot during a wearable challenge in Korea. [Figure 2] (Bukhansan Challenge)A 65-year-old man successfully climbs to the top of Mount Yongbong in Bukhansan Mountain using a wearable robot and muscle support. [Figure 3] Image of the wearable robot MOONWALK-Omni ### KIST was established in 1966 as the first government-funded research institute in Korea. KIST now strives to solve national and social challenges and secure growth engines through leading and innovative research. For more information, please visit KIST’s website at https://kist.re.kr/eng
- 2
- WriterDr. Lee Jongwon
- 작성일2024.01.30
- Views1477
-
1
A 130g soft robot gripper lifts 100kg?
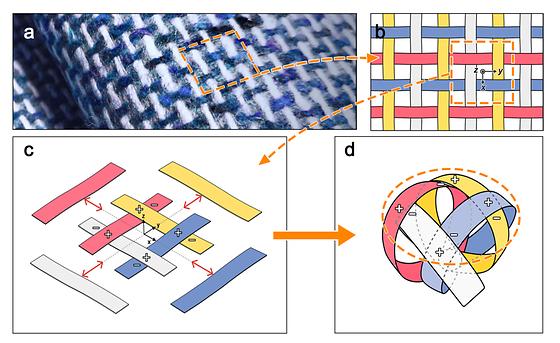
- Developing a soft robotic gripper that mimics a woven structure - Achieve high performance, cost-effectiveness, and process efficiency in a soft robotic gripper Utilizing soft, flexible materials such as cloth, paper, and silicone, soft robotic grippers is an essential device that acts like a robot's hand to perform functions such as safely grasping and releasing objects. Unlike conventional rigid material grippers, they are more flexible and safe, and are being researched for household robots that handle fragile objects such as eggs, or for logistics robots that need to carry various types of objects. However, its low load capacity makes it difficult to lift heavy objects, and its poor grasping stability makes it easy to lose the object even under mild external impact. [Figure 1] GRIPPER SCHEMATIC WITH WEAVE STRUCTURE Dr. Song, Kahye of the Intelligent Robotics Research Center at the Korea Institute of Science and Technology (KIST), along with Professor Lee, Dae-Young of the Department of Aerospace Engineering at the Korea Advanced Institute of Science and Technology (KAIST), have jointly developed a soft gripper with a woven structure that can grip objects weighing more than 100 kg with 130 grams of material. To increase the loading capacity of the soft robot gripper, the research team applied a new structure inspired by textiles, as opposed to the conventional method of developing new materials or reinforcing the structure. The weaving technique they focused on involves tightly intertwining individual threads to create a strong fabric, which can reliably support heavy objects and has been used for centuries in clothing, bags, and industrial textiles. The team used thin PET plastic The grippers were designed to allow the strips to intertwine and unwind into a woven structure. [Figure 2] Gripper behavior and performance The resulting woven gripper weighs 130 grams and can grip an object weighing 100 kilograms. Conventional grippers of the same weight can lift no more than 20 kilograms at most, and considering that a gripper that can lift the same weight weighs 100 kilograms, the team succeeded in increasing the load capacity relative to its own weight. Also, the soft robot gripper developed by the research team uses plastic, which costs only a few thousand won per unit of material, and can be used as a universal gripper that can grip objects of various shapes and weights, making it highly competitive in price. In addition, since the soft robot gripper can be manufactured by simply fastening a plastic strip, the manufacturing process can be completed in less than 10 minutes, and it is easy to replace and maintain, so the process efficiency is excellent. [Figure 3] Comparison of gripper weight to payload (maximum weight the robot can lift) for the woven gripper, soft gripper, and rigid gripper In addition to PET, which is the main material used by the research team, the gripper can also be made of various materials such as rubber and compounds that possess elasticity, allowing the team to customize and utilize grippers suitable for industrial and logistics sites that require strong gripping performance or various environments that need to withstand extreme conditions. "The woven structure gripper developed by KIST and KAIST has the strengths of a soft robot but can grasp heavy objects at the level of a rigid gripper," said Dr. Song. It can be manufactured in a variety of sizes, from coins to cars, and can grip objects of various shapes and weights, from thin cards to flowers, so it is expected to be used in fields such as industry, logistics, and housework that require soft grippers." ### KIST was established in 1966 as the first government-funded research institute in Korea. KIST now strives to solve national and social challenges and secure growth engines through leading and innovative research. For more information, please visit KIST’s website at https://eng.kist.re.kr/ KAIST is the first and top science and technology university in Korea. KAIST has been the gateway to advanced science and technology, innovation, and entrepreneurship, and our graduates have been key players behind Korea’ innovations. KAIST will continue to pursue advances in science and technology as well as the economic development of Korea and beyond. (https://www.kaist.ac.kr/en) The research was supported by the Ministry of Science and ICT (Minister Lee Jong-ho) through the KIST Major Project and the Korea Research Foundation Basic Research Program, the Overseas Advanced Scientist Invitation Program, and the Basic Research Laboratory Support Program. The results of the study were published on August 2 in the international journal Nature Communications (IF:16.6, top 8.2% in JCR) and were selected as Editors' Highlights, which introduces the best 50 papers in each field. Journal : Nature Communications Title : Grasping through dynamic weaving with entangled closed loops Publication Date : 2-August-2023 DOI : https://doi.org/10.1038/s41467-023-40358-y
- 0
- WriterDr. Song, Kahye
- 작성일2023.10.06
- Views1753
-
-1
KIST offers a novel paradigm for social robots
- KIST (CollaBot) received the ICSR 2022 best award in the "hardware, design, and interface" category. - A robotic library system that understands context and situations is proposed to provide comprehensive services. After competing in the finals with the University College London, which presented Bubble Worlds, the research team led by Dr. Sona Kwak from the Korea Institute of Science and Technology (KIST; President Seok Jin Yoon) presented "CollaBot" and received the best award in the "hardware, design, and interface" category at the Robot Design Competition hosted by the International Conference on Social Robotics (ICSR) 2022, which was held at the Chamber of Commerce in Florence, Italy (December 13-16, 2022). Previous studies on social robots were primarily based on humanoid robots that understand the context of situations and provide a range of situation-specific services. However, the commercialization of humanoid robots that were expected to perform tasks similar to, if not above, the capabilities of an actual human, was inhibited because the humanoid robot did not function as well as expected. In addition, because robotic products focus solely on a specific function, they are limited in terms of providing a wide range of assistance adapted to a consumer's environment and situation. To address these limitations, the research team led by Dr. Kwak (KIST) developed a robotic library system (CollaBot) that understands situational context by integrating data collected by various robotic products, and offers context-customized assistance. This system comprising tables, chairs, bookshelves, and lights, provides a human-robot interaction based on the collaborations between different robotic products. The system environment is detailed as follows: the user's smartphone, door, robotic bookshelf, and robotic chair are all connected; hence, the user can search for and select a book of interest on their smartphone, and the selected book will automatically be brought out from the bookshelf. The chair functions as a ladder by moving near to the user and letting the user step on it or a cart by transporting several books. In other words, in addition to executing its original function, each system component also adapts its function depending on the environment to offer user-friendly assistance. Dr. Dahyun Kang of KIST, who designed the interaction of CollaBot said that "the proposed robotic system based on the collaboration between various robotic products provides physical assistance by applying robotics technology to the existing Internet of things to create a hyper-connected society. We expect that this type of system that offers practical assistance in our daily lives can pioneer a novel robotics market." This year's Robot Design Competition at the 13th ICSR was led by the award chair, Amit Kumar Pandey, who participated in the development of key social robots such as Sophia, Nao, and Pepper. This research was conducted via the KIST Institutional Program and KIST Technology Support Center Program. KIST was established in 1966 as the first government-funded research institute in Korea. KIST now strives to solve national and social challenges and secure growth engines through leading and innovative research. For more information, please visit KIST’s website at https://eng.kist.re.kr/ CollaBot: robotic library A chair that alters its functions depending on the situation and context Model demonstrations of robotic library
- -2
- WriterDr. Kwak, Sona
- 작성일2023.02.24
- Views1550